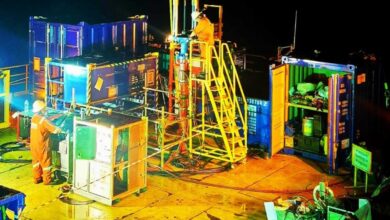
Autonomous robotic drilling, man-machine interface remove people from drill floor

By Joanne Liou, associate editor
In the realm of automation, the best potential for enhanced HSE and cost savings will be achieved through multiple robotic machines that are able to act as independent units or as a stand-alone machine, Kenneth Søndervik, Robotic Drilling Systems, said at the 2013 SPE/IADC Drilling Conference & Exhibition this week in Amsterdam. In presenting SPE/IADC 163466, Mr Søndervik said that he envisions autonomous robotic drilling completely removing people from the drill floor. A test rig running the company’s robotic system in Stavanger, Norway, has demonstrated fully autonomous tripping. While “one machine holds the drill pipe, it will tell the other machine, ‘I’m holding it.’ When the second machine has it, it will tell the first machine, ‘I’m holding it, now.’ All machines will work independently of each other, as well as a group,” he explained. “While one machine is tripping in, the other one will pick up a pipe and be ready for the next.”
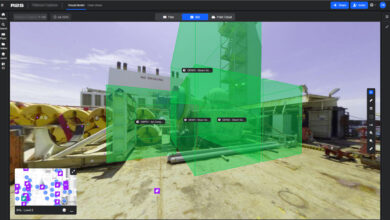
An important element of the company’s robotic system is software that provides a man-machine interface (MMI). Comparing MMI to how a computer relates to the human senses – a monitor for the eyes, speakers for the ears – Mr Søndervik explained that through touch, sound and sight, even miles away, the system will be able to provide real-time feedback. If a problem arises and the machines need to stop, that decision would lie with the operator – the human. Communication through the MMI will also be straightforward, not via a combination of numbers and letters. “We don’t want fault codes coming up saying it’s an ABC25 fault code; you don’t know what that is,” Mr Søndervik stated. “We want software to directly show you what’s wrong. If anything goes wrong inside the machine, you want to be able to see that instantly.”
An ideal MMI would consist of a single piece of software. “We don’t want different software. We want one software that can visualize, control and also do the simulations,” he said. The goal of having different equipment within the robotic system work both as standalone machines and as one coherent unit also applies to the software. “This software needs to be able to control one machine, but we also need to control the group of machines,” Mr Søndervik noted. “We need software that gives us an excellent managing interface.”
In autonomous robotic drilling, the key is having autonomous machines. In Latin, autonomy means “one who gives oneself their own role,” Mr Søndervik said. Walking is an automatic role of humans. “You don’t think when you walk. Same with cycling – you’ve done it once, you never forget.” Different industries, such as the airline industry, already utilize autonomous systems. “A modern passenger airplane is a big flying robot, with many different systems controlled one by one and controlled as a unit,” he said. In the automobile industry, new cars from Google and Mercedes can drive by themselves, he added. The next step is for the oil and gas industry to create robotized drill floors with autonomous machines.
Robotic Drilling Systems is developing a system to be rolled out in Stavanger in 2014 that will completely robotize the drill floor. “The command being given, as in make a BHA or trip in pipe, and the system will then take over,” he explained. “There are no humans working on the drill floor, but still it does the same job.”
The obvious safety benefit is achieved by removing people from the drill floor. For the equipment, “they all know where they are at any given time. No machine can destroy or damage each other,” he stated. Cost savings will be realized per unit. “Electric robotic systems have lower cost per unit,” he said. “It equals easy installment – a plug into the volt, and they’re up and running.” In the long term, compared with hydraulic systems, the robotic system also will have a higher life expectancy, which can further be improved with software, he noted.